导远电子发布高精度地图盒子,提供2km预见性巡航能力

作为自动驾驶安全的基础,高精度定位的重要性毋庸置疑,特别是基于IMU、GNSS信号、视觉感知系统、高精度地图等的融合定位技术,由于可以实现更高的定位精度和冗余性,提升车辆在各类场景中的通过率,正成为行业的主流选择。
为了更好地满足自动驾驶领域对定位的高标准、严要求,在2021上海车展上,国内组合定位技术供应商导远电子宣布推出其第一代高精度地图盒子。该产品通过融合IMU、RTK、车速、ADAS相机、高精地图数据等,可以实现车道级定位,并提供2km预见性巡航能力,为高级辅助驾驶系统提供决策依据,助力L2+自动驾驶功能的研发。
据悉,相较于此前推出的高精度定位解决方案,此次导远电子新推出的高精度地图盒子在以往融合了MEMS高精度惯性导航数据、高精度卫星定位数据等的基础上,进一步加入了ADAS 摄像头数据、高精度地图等的感知数据,可实现95%置信度下横向误差小于0.2米,纵向误差小于2米,为L2+高速领航驾驶、AVP自动代客泊车、PCC商用车预见性巡航众包地图采集和构建等提供精准的参考。
特别是通过新加入的高精地图与高精度定位的匹配,可以帮助自动驾驶汽车获得超普通车载传感器探测距离的感知能力,拓展多种复杂功能场景ODD。即便在GNSS和车道线检测均不能使用的情况下,导远电子高精度地图盒子依旧能够使车辆保持至少400m 车道内自动驾驶,并能满足功能安全的要求。据导远电子介绍,该产品的高清地图数据已覆盖全国高速和城市快速路段。
以对精准定位能力要求相对较高的自动代客泊车AVP为例,由于AVP的应用场景很大一部分是在地库中,该场景不仅结构多样,坡度弯道复杂,光线较差,普通的ADAS摄像头难以正常使用,而且卫星定位功能也很容易失效,实际应用过程中常面临诸多风险点。
但与高精度IMU和地图数据融合后,可以很好地弥补前述不足,在车位地图构建阶段,就利用航位推算(DR)以及相机车位识别的结合准确测绘行驶轨迹和车位位置,并在自动代客泊车过程中,通过多种定位技术的融合顺利引导车辆寻找车位或行驶到目标车位。
不仅如此,该地图盒子还可以用于实现地图更新、众包地图以及实时路况修正。目前来看,要进行高精地图的快速更新和市区、园区等高效地图构建,一种较为可行的方式便是基于SLAM 技术的众包采集,即通过安装在车上的视觉摄像头或激光雷达等传感器,实时检测道路交通环境,并将车道线、交通标识等重要信息打上位置标签后上传到云端,通过多车众包形成可更新的图层,再下发更新给其他车辆,实现地图数据的快速更新。
在此过程中,实时获取车辆本身的准确位置信息尤为关键,因为直接关系到目标位置的定位精度,而一旦定位精度较低,直接影响的就是自动驾驶安全。在高精地图构建过程中,如果车辆的定位精度不够,还会带来更高的地图构建成本。导远电子的高精度地图盒子,通过融合多种定位信息,可以很好地解决上述问题。
在此次发布会上,对于高精度IMU于智能驾驶的重要意义,武汉中海庭数据技术有限公司总经理刘奋博士表示,“如果是通过终极人工智能去解决智能驾驶的话,理论上感知加惯导的技术路线是一个很好的方向。人类通过几百万年的进化,最终是凭借一双眼睛和半规管小脑等器官来保证日常的活动,而IMU之于自动驾驶,就类似于仿真人体学里面的小脑的功能。”
谈及长远的发展目标,导远电子董事长兼CEO李荣熙表示,“未来,我们将继续深耕高精度融合定位技术的,以更好地推动公司‘让每一个人不论何时何地都能享受高精度定位带来的安全和便利’远景的实现。”
据了解,导远电子多年来一直致力于研制车规级高精度惯性传感器和行业领先的定位算法,并先后推出了包括INS570D、INS580S等在内的多款满足汽车工业可靠性质量要求以及可用性标准的高精度定位产品,定点主流主机厂超过20+款乘用车和商用车车型。(本文首发钛媒体APP)
[注:本文部分图片来自互联网!未经授权,不得转载!每天跟着我们读更多的书]
互推传媒文章转载自第三方或本站原创生产,如需转载,请联系版权方授权,如有内容如侵犯了你的权益,请联系我们进行删除!
如若转载,请注明出处:http://www.hfwlcm.com/info/112176.html
相关文章
-

工业4.0和智能制造的关键是数据,关键数据是否采集,采集后能否有效利用数据,防止数据孤岛,如果可以正确有效的利用该数据,那么数据就是新生产力。数据、数字化技术,对整个
-
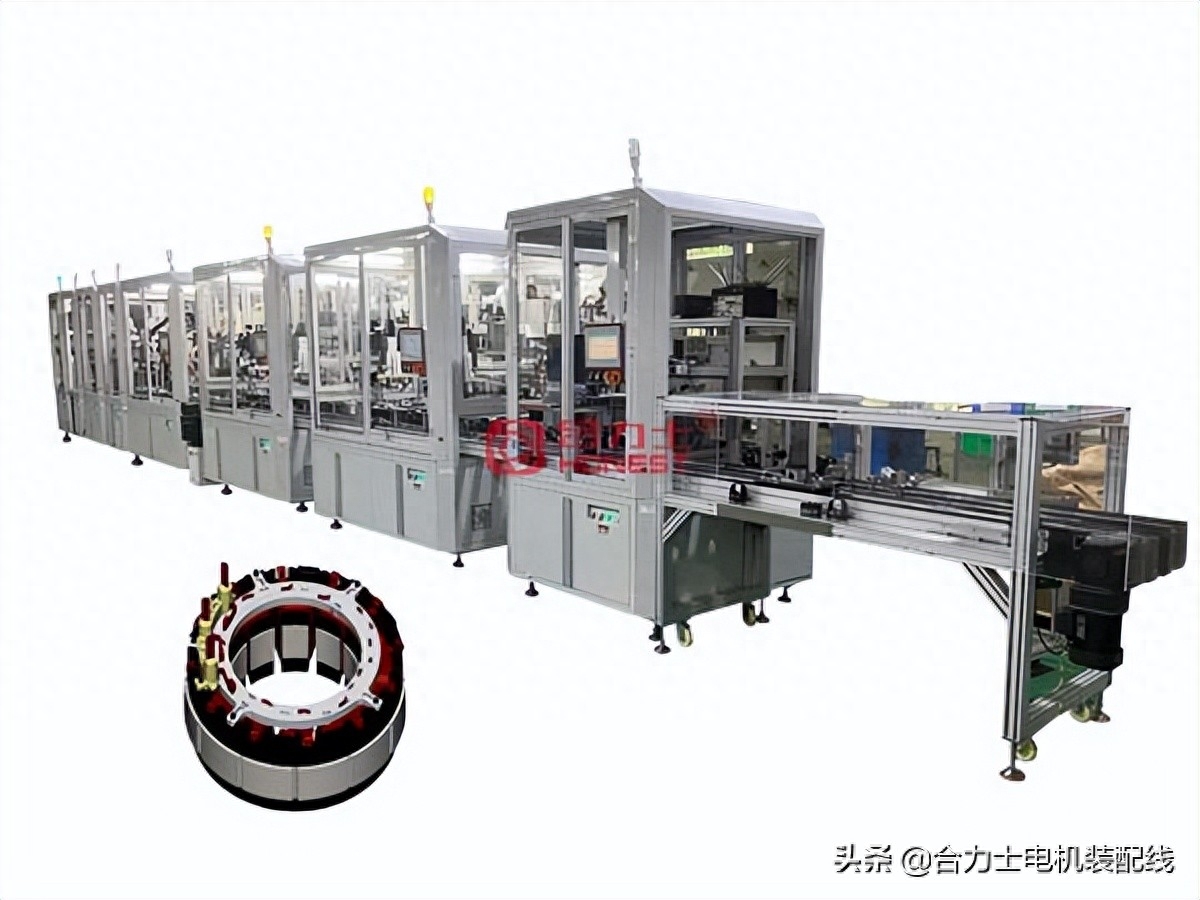
汽车水泵无刷马达定子装配线配置高精度传感器、视觉检测系统等,防漏装、少装、错装及安装后质量检测;产线配置数据追溯系统,并能够和客户MES系统实现对接,具有相对较高的自
-

-
技术介绍汽车钣金无腻子修复、数据修复其实就是通过精细化的钣金使其恢复原状后,直接进行喷涂的技术。传统钣金传统钣金就是将车身覆盖件通过介子机将变形部位进行拉伸敲打恢
-
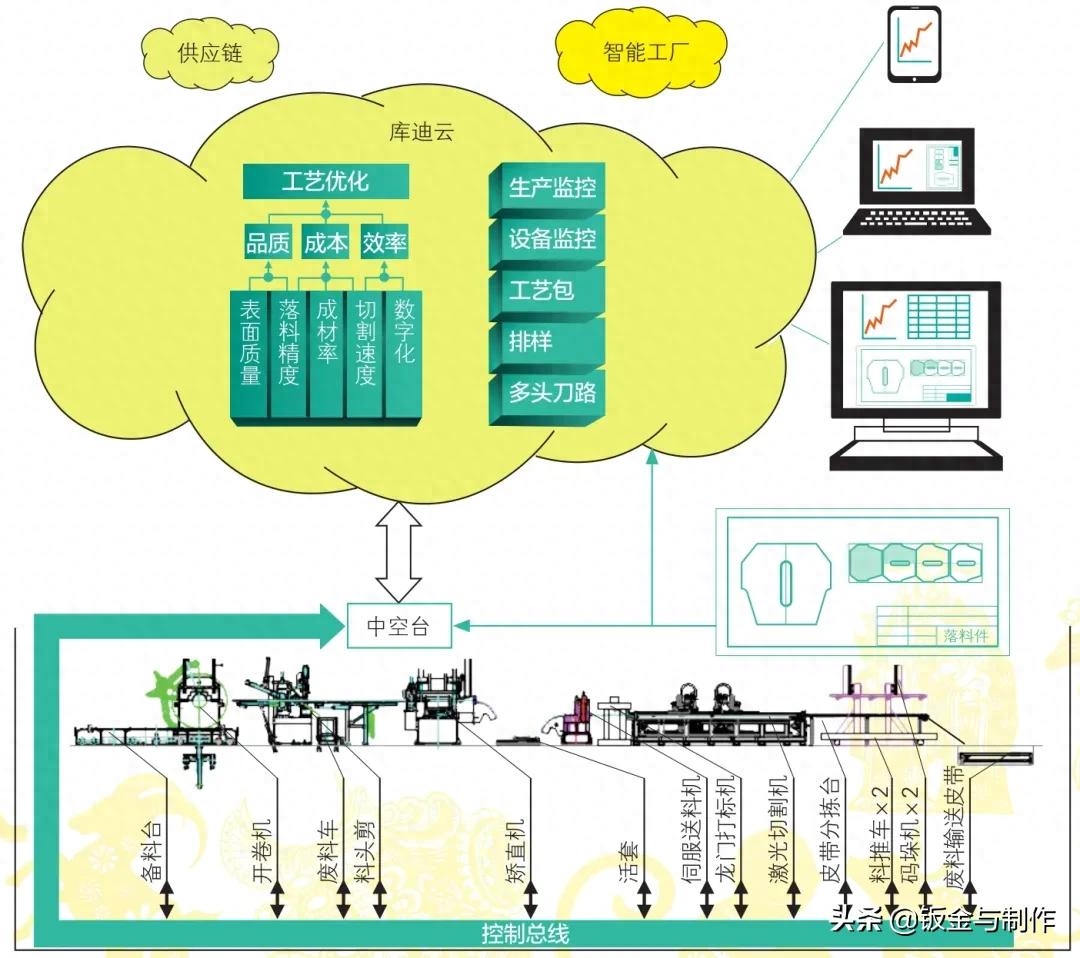
文/王建业,刘佳·广东库迪二机激光装备有限公司在汽车发展领域,新一轮科技革命和产业变革加速演进,颠覆性技术层出不穷,对于汽车供应商来说既是挑战也是机遇。激光加工是先
-

汽车数据复原钣金技术原理是什么?答曰:汽车数据复原无腻子钣金技术,核心工艺就是把钣金整平,且不变薄。市面上很多都是把钣金削薄了,这其实是在破坏钣金。汽车数据复原钣
-

大众辉腾的全车整备工作已经完成,没有使用任何腻子和烤漆。它被人们称为“不怕奔驰和路虎,就怕大众带字母”,这是一款高端车型,售价曾经高达100多万,现在也具有很高的收藏
-

时间到了2019年末,车市寒冬仍在持续,与裁员消息一起出现的还有车企转型潮,汽车巨头及零部件厂商也在通过转型变革谋求新发展,采取各项举措缓解增量压力。裁员潮并非只是因为