流浪地球原型变形玩具#变形机器狗#积木变形玩具
这款52tovs的流浪地球变形机器人,就是那个笨笨。
这才上映了《流浪地球2》,玩具就已经出来了,还能变成方块。这个笨笨内部加入了弹簧机构,能模拟移动时的减震效果,幅度表现相当清晰,回弹顺畅。四个小轮子的轮胎也支持转动,四轮落地后可以在桌面上顺畅滚动。
笨笨的头部两侧是作业用的机械爪,采用了多段关节设计,末端爪子夹取力度不错,可以轻松抓起一些不超过自身体重的道具。作为匣子玩具的一大亮点,就是让笨笨变成方块的收纳形态。

·先把玩过的机械臂折叠起来收纳好,末端的机械爪需要向机械臂根部弯折过去,以便于整合收纳。折叠完毕后,让机械臂的根部通过调整,全部拉伸出来,然后解除整个头部。接着前拉头部单元,解锁后,前半部分利用关节暂时翻转到后背位置,主要是给背部两侧的横梁结构单元,以调整空间,向前外翻。
·两侧带有横梁的一侧向背部方向旋转,在面板装甲的底层,隐藏了一块后背装甲,也需要翻出来,再利用关节收纳回原位,外层就是比较平坦的面板结构了。之前翻转过去的头部手臂单元,再翻转回来,两个柱形卡榫对接回原位进行固定。像投影仪一样的脑袋,我们翻转一下方向,然后利用链接关节,可以把脑袋收纳在背部面板的底下。

·最后,剩余的一对折叠好的机械臂,把带爪子的一侧翻转到底部,然后调整到身前,利用根部关节,把最长的机械臂单元,调整到身体外侧,再向内收纳。我们就已经变形好了上半部分,这个时候,可以利用中间的细小卡榫进行对位固定。

·接着翻到下半身,底部两端带有一层收纳的装甲面板,我们翻开,在根部带有折叠关节,我们全部打直伸展开。在最顶部的白色面板,向内弯折呈现90度。接着翻开底部收纳的第二层面板。
·而四周的腿部,则是利用根部关节,调整到水平于方块的位置,再利用膝盖关节弯折90度,然后向内部空挡逐一收纳腿部。操作过程中会感觉空间可丁可卯。不过别忘了在腿上带有弹簧压缩设计,所以是足够进行操作的。一边调整,一边腿部侧面的凹槽和第一层面板的凸起对接定位。这组面板虽然并非是对称结构,但是都带有一个滑槽的延长设计。外拉以后可以和第一层面板的顶部齐平,同时第二层面板的侧面凸起也和腿部进行辅助稳定。

到此为止,机械狗笨笨的匣子形态就已经还原完毕了。
[注:本文部分图片来自互联网!未经授权,不得转载!每天跟着我们读更多的书]
互推传媒文章转载自第三方或本站原创生产,如需转载,请联系版权方授权,如有内容如侵犯了你的权益,请联系我们进行删除!
如若转载,请注明出处:http://www.hfwlcm.com/info/265095.html
相关文章
-

-
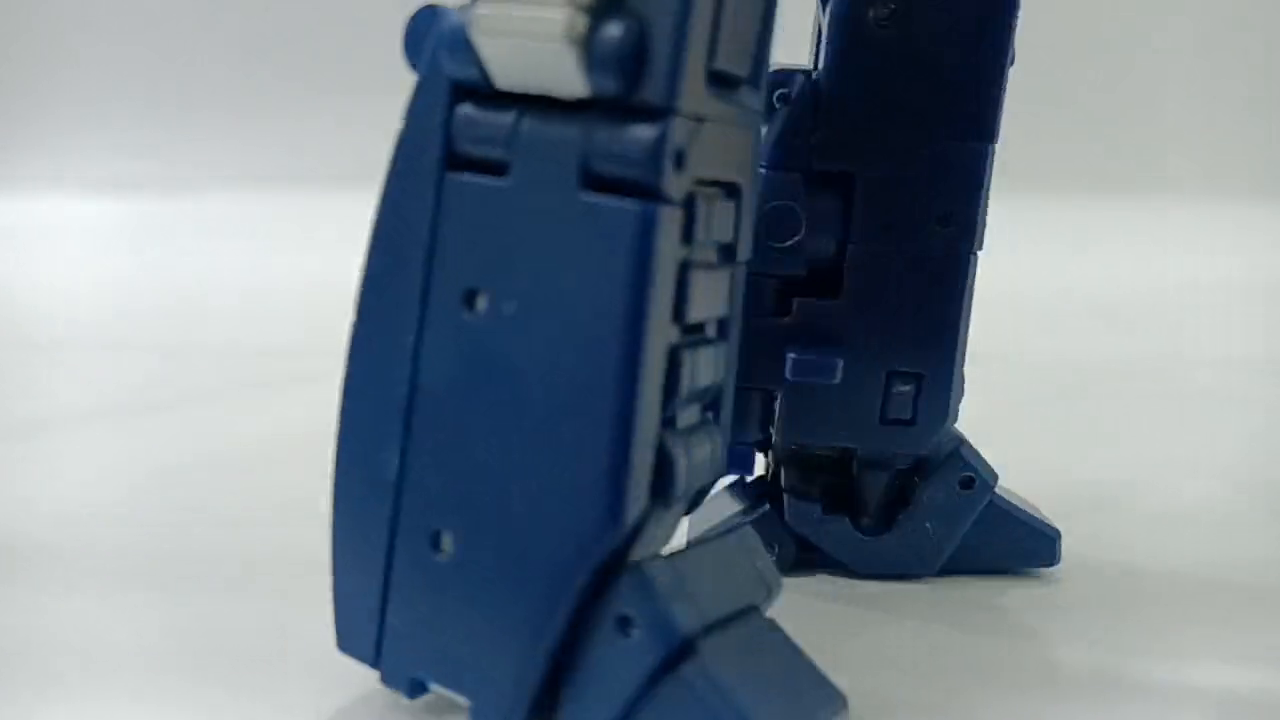
大家好,我是玩胶的恶魔。今天我们来拼装的是酷变宝翻模的小比例震荡波。这款震荡波的零件表面有些油腻,略显粗糙。我们先看主体部分。它的配件部分类似于一把狙击枪,包含了
-

“嘈嘈切切错杂弹,大珠小珠落玉盘。”琵琶,素有“民乐之王”的美称,声音美妙,制作工序但繁杂。今年77岁的苏州人李兆霖,从1962年底开始制作琵琶,至今已逾60年。李兆霖认为,
-

由于2020年新型冠状病毒的爆发,人们都居家不外出,我们不能到办公室上班,工作也停止了,正所谓停工停粮,不上班哪里来的钱,没有钱怎么养活自己。为了有钱买粮,我根据现在的
-
-
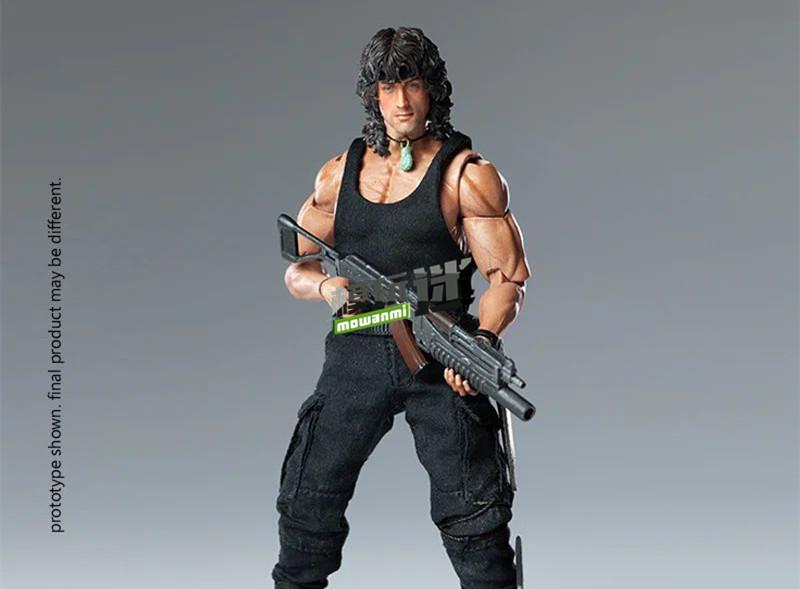
海雅玩具(HIYA)宣布推出超级致系列新品,来自电影《第一滴血3》的兰博 1/18可动人偶,预定将于2024年第二季度出货,官方参考价499元。超级致 兰博 1/18可动人偶全高为16厘米。人偶着
-

低音梁对于小提琴音色的影响在面板的反面板上,粘贴着一木条,称为低音梁,它是中间高两端逐渐低的形状,低音梁的作用,主要是传递振动。小提琴的振动传递过程主要是从琴弦到
-

小提琴音梁又叫低音梁,是粘合于面板内面(琴箱内腔的一面),正值琴马左马脚下的一根狭长木条。它使用与面板相同的云杉木材制作,是和音孔一起制作完成的一道工序。音梁对小提琴