能替你开车的导航系统,抢先体验蔚来NOP领航辅助驾驶
记得在去年6月份的时候,蔚来在延迟了一年之后终于发布了自己的NIO Pilot自动辅助驾驶系统,我们也赶在正式向用户推送前第一时间体验了一下这个功能。结合当时实际的感受,总的来说还是可以让人满意的,不过因为一些功能的无法实现,最终在心里给它的分数也只有85分。时隔1年多的时间,蔚来对他们的NIO Pilot进行了又一次功能上的大升级,而且可以说是里程碑式的升级,那这次的表现又是如何呢?

在私下和他们的工程师聊天时得知,其实这个时间点原本可以再提早不少,但出于某些其他原因的考量,才拖到了现在。而在这次升级中最为重要的,就是加入了NOP(Navigate On Pilot)领航辅助功能,这也让蔚来成为了目前全球第二个实现领航辅助驾驶的汽车品牌。
这篇文章中的内容分为了理论和实践两个方面,如果只想看用起来的感受是怎样的,可以直接跳到后半部分。
领航辅助驾驶是什么?
如果你对特斯拉,或者辅助驾驶功能有所了解,应该会知道特斯拉在之前推出过一个名为NOA导航辅助驾驶的功能,这次蔚来的NOP领航辅助其实也是同样的道理。之所以改名领航辅助,一个自然是为了和前者有所区分,另一个是蔚来更想突出当下的驾驶仍然是以人为主,辅助功能更多的像是一个领航员,一个打辅助的选手,驾驶者仍然需要始终握住方向盘,对路面情况保持专注。

所以说回来,领航辅助具体是什么?用专业点的话来说,它是导航系统、高精地图和NIO Pilot自动辅助驾驶系统的深度融合。在Pilot功能已实现的巡航车速控制、车距保持、转向辅助和转向灯控制变道等功能的基础之上,支持车辆根据导航路径规划,在高精地图覆盖范围内的大部分高速公路及城市高架路等路段实现自动进出匝道和切换主干道。同时可根据道路限速和环境感知等信息自动调整车速、智能变换车道及超越慢车,从而实现指定路径下的按照导航路线自动辅助驾驶。

通俗点来说,就是当你用车载地图导航时,在高精地图开放的范围内,开启领航辅助后车辆会自动从A点向B点行驶。当然,这个全程都需要驾驶者监督,随时做好接管的准备。
所以它是如何实现的?
几句话形容起来看似好像不难,但为了实现领航辅助这一功能,是需要硬件、软件及多方面的协同配合工作才能完成的。
比较好理解的,首先是硬件方面的冗余。1个Mobileye EyeQ4处理器,1个前向三⽬摄像头,4个环视摄像头,5个毫⽶波雷达,12个超声波雷达,1个驾驶员监测摄像头。具体它们都是用来干什么的这里就不展开去说了,但这些都是实现辅助驾驶的基础。没有它们,即便你思想再丰满也毫无意义。这些硬件不仅要满足当下技术的需求,同时也要能够支撑起未来将会达到的高度。打个可能不太准确的比方,就像我们玩电脑游戏,这游戏做得再好,画面再炫酷,电脑配置不够也是白瞎。
“配置”够了,接下来就该往里面装“游戏”了。这次推出的领航辅助驾驶是在NIO Pilot自动辅助驾驶系统基础上延伸出来的,换句话说,没有之前软件的迭代,也就没有现在的领航辅助。

开头提到过,领航辅助是NIO Pilot、导航地图和高精地图深度融合后实现的。导航地图很好理解,就是我们平时导航时常用的比如高德地图、百度地图等等,高精地图又是什么呢?
其实所谓高精地图,是和普通的导航地图对比来说的。简单来说,导航地图是基于GPS卫星来定位和导航的,它的定位精度在10米左右。也就是说,当我们看导航地图的时候,你可以看到自己正处于某某路或某某大街上,但它无法显示你具体在哪条车道上。

对于普通的导航来说,这个精度已经足够了,因为它只需要为你指路,但不需要帮你看路。但当应用到自动辅助驾驶领域,这个误差就不行了,行车电脑需要清楚的知道自己周围的情况,处在哪条车道,从而自主完成并线、超车、避让、进出匝道等一系列动作。
这时,就要请出高精地图了。高精地图的绝对坐标精度(地图上A目标和现实世界A事物之间的精度)通常都会在亚米级,也就是小于1米的精度,横向的精度甚至会更高,可以精确到10-20厘米。所以,普通导航地图只是给我们绘制出了道路大体轮廓,而高精地图不光可以描绘出轮廓,还能告诉我们这条路有多少车道,什么地方变宽了,什么地方变窄了。甚至哪有隔离带,哪有马路牙子,每条车道之间是虚线,是实线,还是双黄线等等,都能知晓。

绝对精度高,是高精地图的一大特点。而除此之外,它还能准确的反映出道路形状,每条车道的坡度、曲率、航向、侧倾等等一系列数据。有了这些做背书之后,车辆不光可以通过自身搭载的雷达、传感器来判断周围的情况,更可以通过高精地图对更远的距离进行提前感知和推算,这对于领航辅助驾驶,甚至未来的自动驾驶,都是至关重要的。

弯弯绕绕说了这么多,其实也只是一些浅显的皮毛。这项技术相对门槛是非常高的,我们国家做高精地图的企业并不多,人才是一方面,另一方面只有拿到相关资质的公司,才能被允许进行地图采集,所以可想而知吧。作为用户或者体验者的我们来说,大概知道高精地图是个什么东西,怎么服务于辅助驾驶就好。

有的同学是不是会有疑问,高精地图这么厉害,为什么不能替代导航地图呢?原因有两个,一个是高精地图的使用是有限制的,不是所以地方都会开放使用权限,比如北京这样的城市局限性更大,只在高速、城市快速路和部分环路开放。另一个最核心的是,普通导航地图是面向人的,说白了就是我们用眼睛可以直观看到的,而高精地图是面向机器的,是供汽车等使用的地图数据。
NOP用起来感受如何?
结论先行吧,相比于特斯拉的NOA,蔚来的NOP领航辅助要内敛太多,它更像是一个内向求稳的孩子,做什么事之前都会用更长的时间思考和观察,而后再作出决定。并且在要做决定之前,还会一直碎碎念的提醒你:“帮我看着点,帮我看着点”。
NOA和NOP,你很难严格的说出孰好孰坏,他们更像是性格截然不同的两个人。只能说,蔚来NOP应该更适合我们中国的行车习惯和驾驶风格,而特斯拉的NOA在有些时候会略显“水土不服”。
在蔚来NOP没有推出之前,很长一段时间只有特斯拉一家提供导航辅助驾驶这项功能,由于平时体验的也比较多,所以对特斯拉的风格还是比较了解的。正好这次试驾同时给提供了Model X和ES6/ES8两台车来对比,我们就先来回顾一下特斯拉的表现。(由于车辆必须处于行驶状态才能抓拍到部分图片,所以质量有限,望见谅)

两次试驾所走的路线是相同的,单次全程大概60多公里,我们从城市内部道路出发,途径五环路、京哈高速、六环路、京台高速,最后回到出发点。特斯拉和蔚来在城市道路中目前在辅助驾驶方面没有本质上的区别,高精地图目前都没有开放,只能使用AP行驶。区别在于,特斯拉当下仅支持六环路、城市快速路和高速,而蔚来多出了一个五环主路。所以在上京哈之前,是无法启动NOA的。

AP行驶时,特斯拉的界面会使用两条蓝色实线来显示当前所在车道,此时可以手动打转向灯让车辆变道,车辆无法自主变道、超车。
开启转向灯后,即将变道的方向会变为红色虚线,目标车道也会提前标注出并线后车辆的位置。

当车辆识别到目标车道不满足变道要求时,会在界面上标注出危险车辆,并暂停变道。

驶上高速之后,特斯拉NOA自动开启,界面中两条蓝色实线改为中间一条实线,此时车辆会被接管。
在这期间,特斯拉的表现更像是一个激进、不太安分的老司机。前方遇到慢车后,通常会果断自动打灯变道,随即加速超车,整个动作一气呵成。这样的好处是会给你果断不拖沓的感觉,但坏处是,由于相对过于激进,造成很多时候并线距离非常极限,让后车不得不减速,并伴随着一阵鸣笛的声音……

在即将驶离高速或准备出匝道的时候,车辆大概会在距离出口2公里的时候开始准备向右变道。顺利的话,特斯拉会很快变到最右侧车道等待驶离,此时地图旁会默默地出现一个提示,高速驾驶者可以手动取消。如果因为车流等原因,导致并线不太顺利,这时特斯拉又会开启老司机模式,配合超强的动力开始不断尝试加速再变道。总之,就是必须把你带到出口位置,如果没有过硬的心理素质,此时建议手动接管。

特斯拉在自动辅助驾驶选项上比蔚来多,蔚来只有一个标准模式,而特斯拉多出一个类似激进的模式。如果开启它,即便是还有几百米就驶离匝道了,一旦前方有下图这种慢车,它会选择先向左并线,再一脚油门并到最前面。体验之后你会发现,这不是所有人都能受得了的……

这之后平稳的行驶了一段时间,直到一辆速度较快的汽车从匝道汇入主路。从屏幕上来看,特斯拉识别到了这辆车,给出的判断是没有危险,无需做出反应。但这辆车并没有减速,反而是加速想要开到我们这台特斯拉之前。结果是,突然地大幅减速让车里的人都吓了一跳。

换到蔚来上,在地图上设好目的地之后,地图上会提前标出车辆可以开启NOP领航辅助驾驶的位置。经过此地时,车辆会自动开启领航辅助。

这里多说一句,无论是特斯拉还是蔚来,在路面丢失行车线的时候,驾驶者一定要马上接管回车辆,保证行车安全。

除了驾驶风格不同,蔚来和特斯拉另一个区别是,蔚来对于车辆意图的提醒是非常频繁的。因此只要开启NOP,NOMI就会频繁的对你“碎碎念”,提醒驾驶者“我要变道了,帮我看着点。”“我要出匝道了,帮我看着点。”“即将开始领航辅助”“这段路有点难,还是你来吧。”等等这些(当然原话不是这么说的)。而反观特斯拉,提示少之又少。这点也印证了,蔚来的NOP更加强调人,也就是驾驶者的重要性。


在NOP领航辅助行驶的过程中,车辆同样会在合适的时间超越前方慢车,并用红色行车线在界面上标出,但整个过程就要保守很多了。车辆通常会选择后方车辆距离很远的时候才变道,虽然看上去比较慢,但优点是会更稳,同时不会出现“坐”一下后车的情况发生。

基于高精地图,车辆在进入匝道或是弯度较大的道路时,会提前依照道路曲率,周围交通流速度,高精地图限速等多重因素计算出推荐限速,并不是傻傻的只按照路标限速牌行驶。这里让我想起一年多前NIO Pilot刚推出的时候,车辆甚至是无法自主通过弯度较大的道路的,而现在这已经是基本操作了。

如果车辆感觉无法自主汇入主路,会弹出让驾驶者接管方向盘的提示,并不会硬来,还是一贯的保守风格。

在最后的一段试驾中,遇到了车流量相对较大情况,此时车辆多次尝试变到左侧车道,均因为车辆较多而最终放弃变道,和特斯拉形成了鲜明的风格对比。

写在最后
就像刚才所说,你很难对于特斯拉的NOA及蔚来的NOP给出明确的孰优孰劣,它们一个相对激进,一个保守为上。但不得不承认的是,蔚来作为我们的中国品牌,对于中国路况及驾驶风格的优化更为出色,而特斯拉激进的风格很大程度上就是因为没有针对国内真实的道路情进行本土优化导致的。
最后用和蔚来工程师聊天的一句话来结束——毫无疑问,特斯拉仍然是当下自动辅助驾驶技术最先进的企业。而我们的优势在于,可以吸取他们的经验,从而更加完善我们自己的品牌。
现在看来,中国的品牌已经越来越好,越来越富有竞争力了。
[注:本文部分图片来自互联网!未经授权,不得转载!每天跟着我们读更多的书]
互推传媒文章转载自第三方或本站原创生产,如需转载,请联系版权方授权,如有内容如侵犯了你的权益,请联系我们进行删除!
如若转载,请注明出处:http://www.hfwlcm.com/info/255670.html
相关文章
-
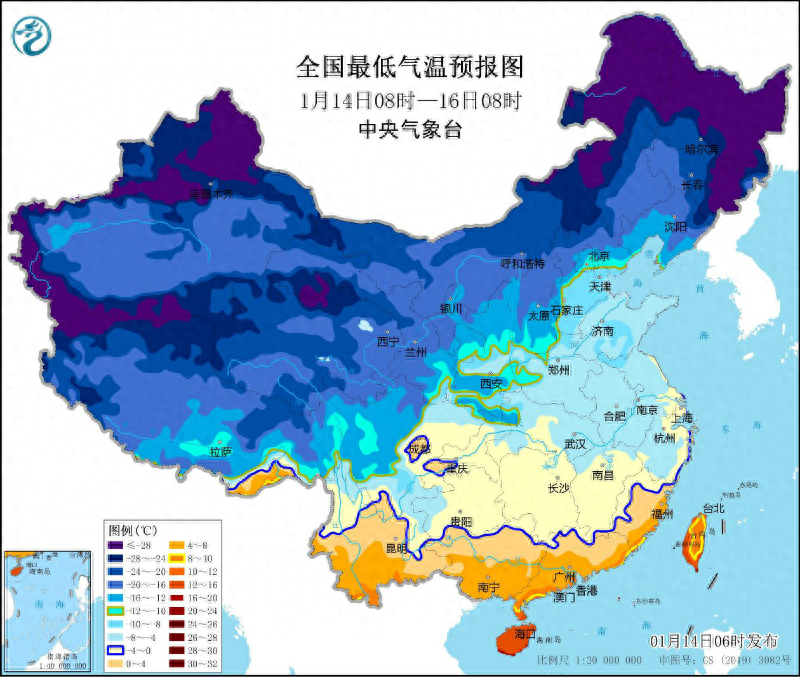
中央气象台15日再次发布寒潮蓝色预警。1月15日起,西南地区东南部、江南中东部和南部、华南大部等地将先后降温6~8℃,部分地区降温8℃以上。吉林、黑龙江和内蒙多地降温超过16~
-

齐鲁网济南11月24日讯 近日,强冷空气发威,伴随着四到六级大风,山东多地从昨夜到今天上午都喜迎降雪。冰雪天来了,爱车放在户外,一不小心就被冻住了。面对爱车“落难”,如果
-

可以肯定,各位有车一族的朋友们,或多或少遇到过车辆维修问题,但是否有过因为配件等待,车辆迟迟未能维修的经历呢?最近,一位来自四川成都的张先生,在汽车投诉网发起一则
-

近日受寒潮天气影响,全市部分区县冰冻雨雪恶劣天气频发,重庆公安迅速启动应急处置预案,强化部门联动、区域协同、高地协作,联合交通运输、气象等部门,加强巡逻管控力度,
-

自己的轿车被别人车辆追尾了,正常报交警,进汽修厂,联系保险定损员定损,然后汽修厂用旧的配件修理车辆,这样的事情发生了,总感觉好像哪里不对劲,请求各位支招
-

随着汽车成为我们日常生活中的重要交通工具,如何降低用车成本成为了很多人的关注焦点。除了在日常使用中注意保养和维修,我们还可以通过更换汽车零部件来节约汽车维修费用。
-

大家是否曾遇到过以下情况,自己车辆在保修期内就同一配件频频出现质量问题,而经过多次维修车辆以及更换配件也未能彻底解决!虽说在保修期内出现故障能够得到免费维修,可如
-

进入冬季,伴随天气越来越冷,就像人要加衣服以抵御严寒一样,我们的爱车到了冬季也有需要需要注意的地方。不然,爱车生病了难受的可就是自己了。今天,小编就带了一些冬季用