七种驾驶辅助系统的功能和原理介绍

1、驾驶员疲劳探测
功能:能识别到驾驶员的疲劳状态
原理:单调的行驶方式(例如高速公路行驶)容易使人疲劳,并很快导致注意力下降。驾驶员疲劳探测以转向角度信息为基础,持续分析驾驶员的转向动作,探测其短时间内未转向然后却突然修正方向的阶段–这常常是注意力下降并出现疲劳的一个标志。该功能将这种反应模式的频率和强度与其他数据,如车速、时间或转向信号灯的操作组合在一起,由此计算出疲劳指数。如果这个指数超过一个预定义的值,就会给驾驶员发送一个声音和/或视觉信号,提醒驾驶员已经疲劳或有打瞌睡的危险。
2、智能大灯控制
功能:确保最佳道路照明
原理:智能大灯控制可以借助一个摄像头测量环境亮度,并识别到前方行驶车辆或迎面来车及其距离。这些数据被用来实现各种灯光功能。
近光灯激活功能可以根据当前的光线情况自行打开或关闭车辆的近光灯。
远光灯激活功能可以让驾驶员尽可能频繁地使用远光灯行车,而无需手动打开或关闭。如果该功能未识别到其他车辆,就会激活远光灯。如果该功能探测到其他车辆,则会关闭远光灯。
根据视频数据还可以自动调节近光灯或远光灯的照明范围。自适应近光灯控制功能可以将近光灯的水平高度与车道轮廓持续匹配。尤其是在上坡或崎岖的路面上时,总是能够保持良好的车道照明,而不会让其他驾驶员眩目。

3、自适应巡航控制
功能:帮助驾驶员调整车速,并与前方车辆保持安全距离。
原理:在行驶过程中,ACC保持由驾驶员预先设定的车速,通过自行收油门、制动或加速而与变化的交通状况相适应。ACC的另一版本“停走型ACC(Stop&Go)”还能将车辆自行制动到停止,并在驾驶员确认后自动重新启动车辆。
4、车道偏离警告
功能:对在不经意间离开标记车道发出警告
原理:车道偏离警告可借助摄像头识别车辆前面的车道标记,并将其与车辆在车道中的位置进行比较。如果车道偏离预警探测到车辆有不经意间离开车道的危险,则通过视觉、声音和/或触觉(例如方向盘振动)信号发出警告。这样,驾驶员能提前注意到偏离车道并进行相应的方向调整。如果驾驶员在变换车道或转弯时打开转向信号灯,则该功能不会发出警告。
5、车道保持辅助
功能:主动帮助驾驶员保持在标记的车道中
原理:车道保持辅助同样使用摄像头探测车辆前面的车道标记。如果该功能识别到与车道边界线的距离小于定义的最小距离,车道保持支持系统就会温和但明显地将车辆转向反方向,从而使车辆保持在车道内。驾驶员可以随时无视该功能而越权控制,并对车辆操控负责。如果驾驶员在变换车道或转弯时打开转向信号灯,则该功能不进行干预。

6、车道变道辅助
功能:在变道时对碰撞危险做出警告
原理:该系统以监控车辆侧面和斜后方区域的雷达传感器为基础。如果系统探测到盲区中的车辆或从后方高速驶来的车辆,则以视觉形式警告驾驶员,例如在车侧后视镜中显示一个发光符号。在驾驶员因需要变道而打开了转向灯的情况下,该系统还能发出听觉和/或触觉警告,提醒驾驶员注意潜在的危险。

7、紧急制动系统
功能:在即将发生追尾事故的情况下,帮助驾驶员防止事故的发生或者至少降低事故的严重程度。
原理:如果紧急制动系统识别到与前车快速接近并存在追尾危险时,就会让制动系统提前做好紧急制动的准备。如果驾驶员未对危险情况作出反应,系统会通过一个听觉和/或视觉信号警告驾驶员,并随之产生一个短促但可感知的间歇制动。
然后紧急制动系统执行部分制动,以降低车速并给驾驶员创造更多宝贵的反应时间。一旦驾驶员踩下制动踏板,系统就会在制动时提供支持。
为此,系统持续计算汽车为避免碰撞所需的减速度。如果系统识别到驾驶员的制动强度不够,则会增加制动压力使车辆尽可能在障碍物前停止,以最大限度地避免碰撞。
如果驾驶员未做出任何反应并且系统预估碰撞不可避免,则会触发完全制动,以尽可能地减轻碰撞后果。

[注:本文部分图片来自互联网!未经授权,不得转载!每天跟着我们读更多的书]
互推传媒文章转载自第三方或本站原创生产,如需转载,请联系版权方授权,如有内容如侵犯了你的权益,请联系我们进行删除!
如若转载,请注明出处:http://www.hfwlcm.com/info/88709.html
相关文章
-
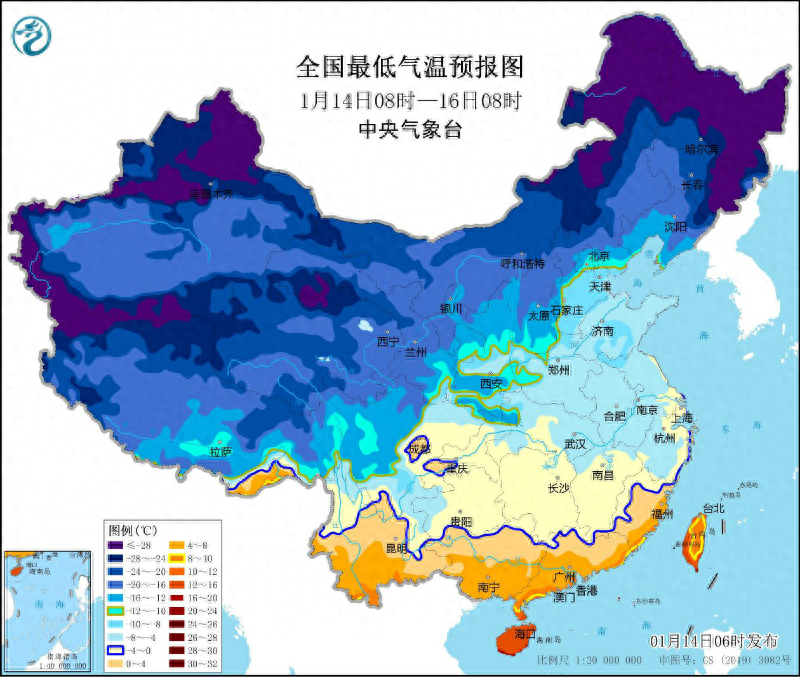
中央气象台15日再次发布寒潮蓝色预警。1月15日起,西南地区东南部、江南中东部和南部、华南大部等地将先后降温6~8℃,部分地区降温8℃以上。吉林、黑龙江和内蒙多地降温超过16~
-

齐鲁网济南11月24日讯 近日,强冷空气发威,伴随着四到六级大风,山东多地从昨夜到今天上午都喜迎降雪。冰雪天来了,爱车放在户外,一不小心就被冻住了。面对爱车“落难”,如果
-

可以肯定,各位有车一族的朋友们,或多或少遇到过车辆维修问题,但是否有过因为配件等待,车辆迟迟未能维修的经历呢?最近,一位来自四川成都的张先生,在汽车投诉网发起一则
-

近日受寒潮天气影响,全市部分区县冰冻雨雪恶劣天气频发,重庆公安迅速启动应急处置预案,强化部门联动、区域协同、高地协作,联合交通运输、气象等部门,加强巡逻管控力度,
-

自己的轿车被别人车辆追尾了,正常报交警,进汽修厂,联系保险定损员定损,然后汽修厂用旧的配件修理车辆,这样的事情发生了,总感觉好像哪里不对劲,请求各位支招
-

随着汽车成为我们日常生活中的重要交通工具,如何降低用车成本成为了很多人的关注焦点。除了在日常使用中注意保养和维修,我们还可以通过更换汽车零部件来节约汽车维修费用。
-

大家是否曾遇到过以下情况,自己车辆在保修期内就同一配件频频出现质量问题,而经过多次维修车辆以及更换配件也未能彻底解决!虽说在保修期内出现故障能够得到免费维修,可如
-

进入冬季,伴随天气越来越冷,就像人要加衣服以抵御严寒一样,我们的爱车到了冬季也有需要需要注意的地方。不然,爱车生病了难受的可就是自己了。今天,小编就带了一些冬季用